欢迎您来到半岛在线登录官网



来源:半岛在线登录官网 发布时间:2024-04-13 04:41:03
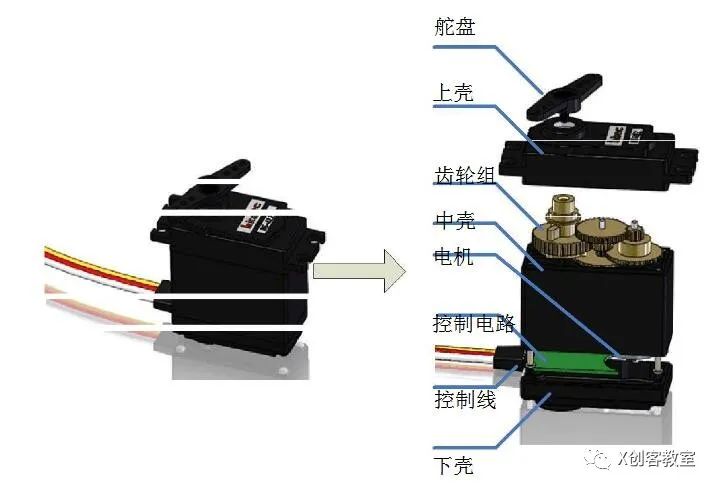
**舵机的结构组成:**一般来说舵机主要由以下几个部分所组成,舵盘、减速齿轮组、方位反应电位计、直流
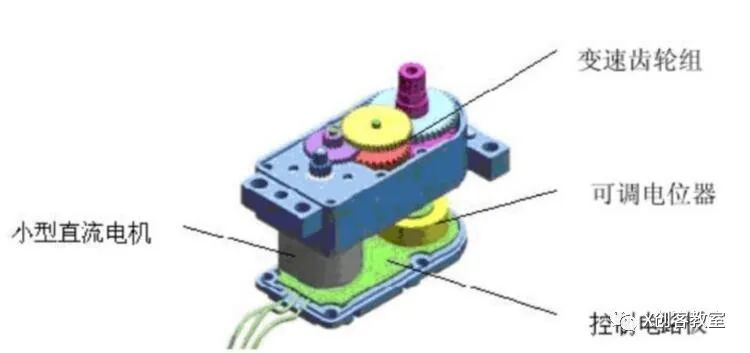
**舵机作业原理:**舵机安装了一个电位器(或其它视点传感器查验测验输出轴滚动视点,操控板依据电位器的信息能比较精确的操控和坚持输出轴的视点。这样的直流电机操控办法叫闭环操控,所以舵机更精确的说是伺服马达。
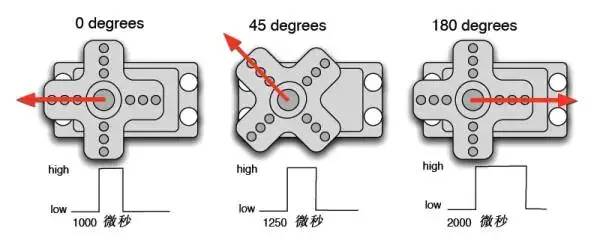
舵机视点操控:舵机滚动的视点是经过调理PWM(脉冲宽度调制)信号的占空比来完成的。规范的PWM信号的周期固定为20ms,理论上脉宽散布应该在1ms到2ms之间,实际上可由0.5ms到2.5ms之间,脉宽与转角0°—180°相对应。不同厂家不相同的类型的舵机也会有所差异。
舵机一般都外接三根线,分别用棕、红、橙三种色彩进行区别,因为品牌不同,色彩也会有所差异,棕色为接地线,赤色为电源正极线,橙色为信号线。Arduino若需求操控多个舵机,需求外接电源以及运用专用的舵机操控板。
Write(视点)—用于设定舵机旋转的视点,可设定规模0°—180°。
Read()—用于读取舵机视点的句子,可理解为读取最终一条write()指令中的值。
声明:本文内容及配图由入驻作者编撰或许入驻协作网站授权转载。文章观念仅代表作者自己,不代表电子发烧友网态度。文章及其配图仅供工程师学习之用,如有内容侵权或许其他违规问题,请联络本站处理。告发投诉
是电机的一种,通上电并采纳适宜的办法就能够使他滚动,而电位器是一种电路元件,经过扭动电位器的旋钮就能够让经过电位器的电压和电流发生变
及具体过程 /
办法 /
AMD自适应核算加快渠道之GTYP收发器误码率测验IBERT试验(6)
Microsoft.IO.RecyclableMemoryStream进步程序功能
【Longan Pi 3H 开发板试用连载体会】给ChatGPT装上眼睛,而且还能够语音对线,体系根底装备
【Longan Pi 3H 开发板试用连载体会】给ChatGPT装上眼睛,还能够语音对线 阅览
飞凌嵌入式ElfBoard ELF 1板卡- 削减uboot阶段的等待时间
各位教师,讨教《模电》问题: 为啥说“分母s的一次项系数大于0时,电路才干安稳作业”
友情链接: