欢迎您来到半岛在线登录官网



来源:半岛在线登录官网 发布时间:2024-03-01 05:26:01
移动机器人的概念正在加快速度进行发展,移动机器人的数量和其复杂性随着不同的应用而增加。
有许多类型的移动机器人导航技术,如路径规划、自我定位和地图解释。避障机器人是一种自主移动机器人,它能够尽可能的防止与意外的障碍物发生碰撞。
在这个项目中,我们设计了一个避障机器人。它是一个基于Arduino的机器人,使用超声波测距仪传感器来避免碰撞。
Arduino Uno是一个基于ATmega 328p微控制器的原型开发板。它是一个开源的电子原型开发平台,可用在所有传感器和执行器。
Arduino Uno有14个数字I/O引脚,其中6个引脚被用于本项目中。
它是一个超声波测距仪传感器。它是一个基于非接触的距离测量系统,可以测量2厘米到4米的距离。

Tower Pro SG90是一个简单的伺服电机,可以在每个方向上旋转90度(总共约180度)。
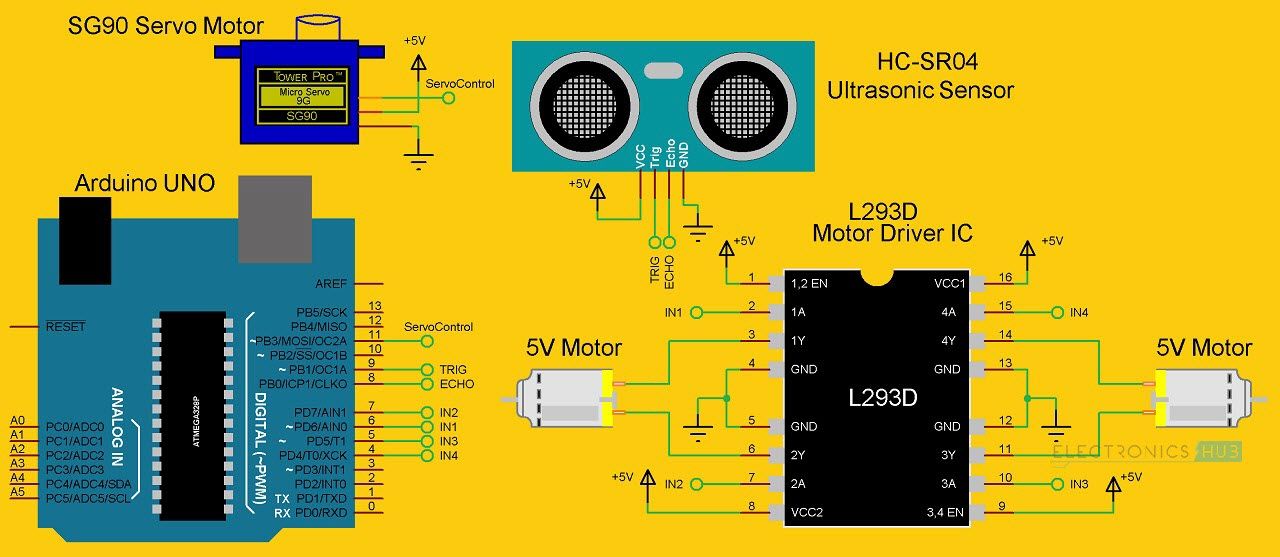
Arduino是该机器人的主要处理单元。在14个可用的数字I/O引脚中,有7个引脚被用于本项目设计。
伺服电机用于旋转超声波传感器以扫描障碍物。它有三个引脚,即控制、VCC和GND。伺服控制引脚连接到Arduino的11号引脚,而VCC和GND则连接到+5V和GND。
L293D是一个16针的集成电路。引脚1和9是启用引脚。这些引脚连接到+5V。 引脚2和7是单片机对第一个电机的控制输入。它们分别与Arduino的6和7号引脚相连。
同样地,10号和15号引脚是微控制器对第二个电机的控制输入。它们被连接到Arduino的5和4号引脚。L293D的4、5、12和13脚是接地引脚,与Gnd相连。
第一个电机(视为左轮的电机)连接在L293D的3和6号针脚上。第二个电机,作为右轮电机,连接到L293D的11和14针脚。
L293D的第16针是Vcc1。这是与+5V相连的。第8个引脚是Vcc2。这是电机的电源电压。它可以连接到4.7V和36V之间的任何地方。在这一个项目中,L293D的第8个引脚连接到+5V电源。
注意:电机驱动器的电源,即第1针(使能1)、第8针(VCC2)、第9针(使能2)和第16针(VCC1)应该有单独的电源供应。
电机驱动板能够正常的使用板上的5V电压调节器。在本项目中也使用了一个类似的电源。
在进行项目工作之前,重要的是要了解超声波传感器的工作原理。超声波传感器工作的基础原理如下:
使用一个外部触发信号,超声波传感器的Trig引脚被设置为逻辑高电平,至少10µs。发送器模块发出一个声波脉冲。这包括8个40KHz的脉冲。
信号在撞击到表面后返回,接收器检测到这个信号。在发送信号和接收信号的过程中,回音针是高电平。这一段时间可以通过适当的计算转换为距离。
这个项目的目的是使用超声波传感器和Arduino实现一个避障机器人。所有的连接都是按照电路图进行的。本项目的工作原理解释如下。
当机器人通电时,机器人的两个马达会正常运行,机器人会向前移动。在此期间,超声波传感器不断计算机器人与反射面之间的距离。
这些信息由Arduino处理。若机器人与障碍物之间的距离小于15厘米,机器人就会停下来,用伺服电机和超声波传感器向左右方向扫描新的距离。如果左边的距离大于右边的距离,机器人将准备左转。但首先,它要退后一点,然后激活左轮电机,使其反转。
同样地,如果右边的距离比左边的距离大,机器人就准备向右旋转。 这样的一个过程一直持续下去,机器人一直在移动,不会撞到任何障碍物。
当使用9V电池时,至少需要2个这样的电池为机器人供电。最好使用2个9V电池(一个用于Arduino、超声波传感器、伺服电机,另一个用于L293D和电机)。
友情链接: